
Digitaalkaamerate ja pilditehnoloogia valdkonnasMipi kaameraon sageli ilmnenud, eriti mobiilseadmete ja täiustatud pildisüsteemide kontekstis. MIPI tähistab mobiilse tööstuse töötleja liidest, mis on 2003. aastal MIPI Alliansi algatatud avatud standard. See liit, mille asutasid sellised ettevõtted nagu Arm, Nokia, ST ja TI, hõlmab mitmekesist rühma tööstusharude osalejaid, sealhulgas mobiilseadmete tootjaid, pooljuhtide ettevõtted, tarkvaramüüjad, süsteemitarnijad, teise seadme tootjad ja teised.

MIPI alliansi eesmärk on standardiseerida mobiilseadmete, näiteks kaamerate, kuvarite, raadiosageduse (RF)/põhiriba ja muude alamsüsteemide sisemised liidesed. Seetõttu lihtsustab see disainiprotsessi ja suurendab paindlikkust, võimaldades tootjatel valida mitmesuguste turul olevate laastude ja moodulite hulgast, et rahuldada nende konkreetseid vajadusi.
MIPI ei ole üksikliide ega protokoll, vaid protokollide või standardite komplekt, mis on kohandatud mobiilseadme erinevate alamsüsteemide ainulaadsete nõuete järgi. Nende hulka kuulub:
CSI (kaamera jadaliidese) kaameramoodulite jaoks.
DSI (kuvari seerialiidese) kuvamisühenduste jaoks.
DIGRF raadiosagedusliideste jaoks.
Slimbus mikrofonidele ja kõlaritele.
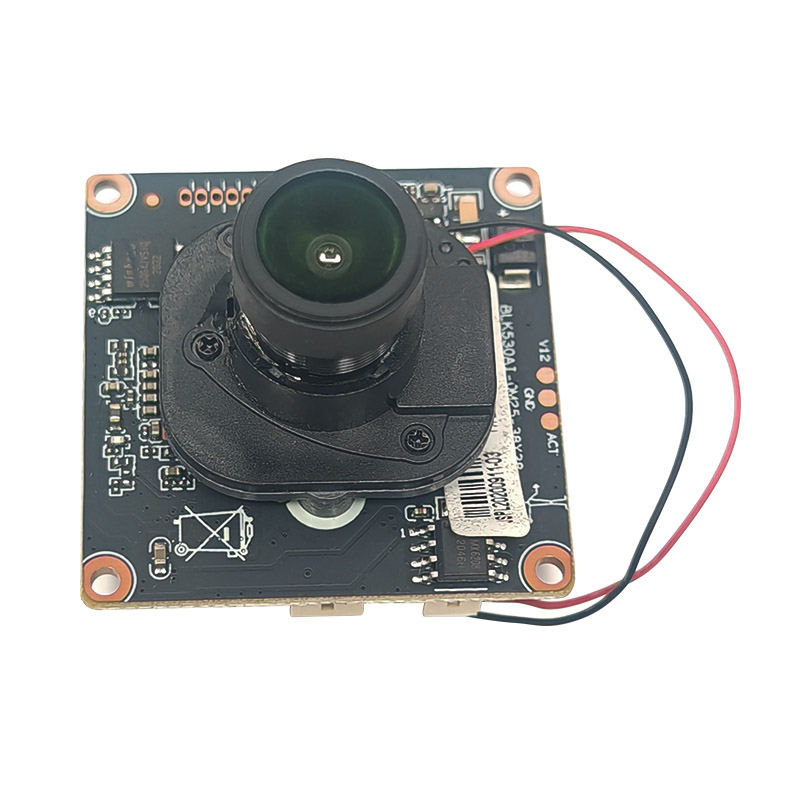
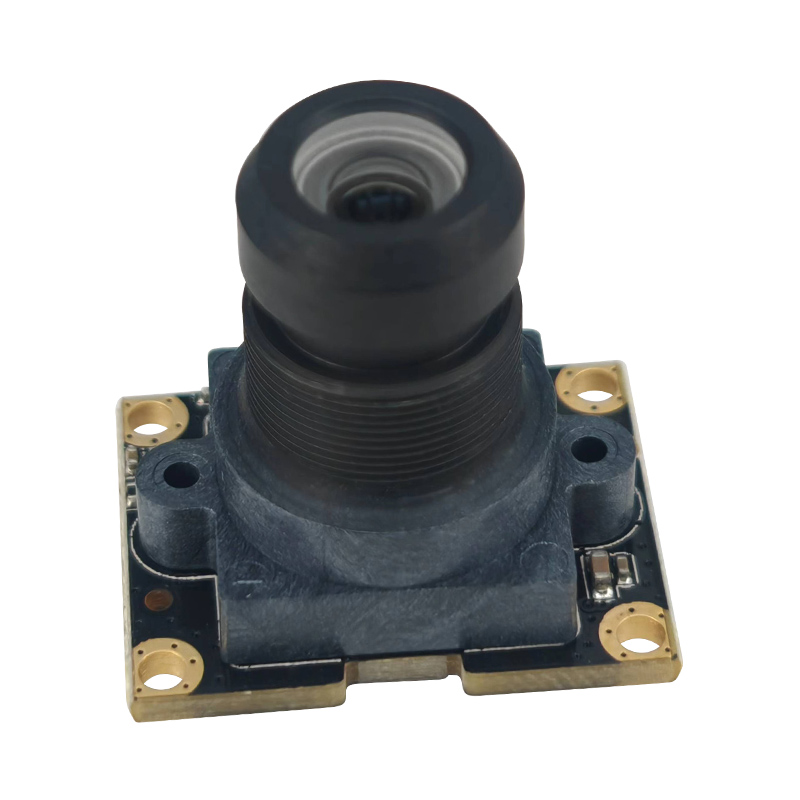
Mipi kaamera: detailne pilk
MIPI kaamera on kaameramoodul, mis kasutab MIPI CSI standardit hostprotsessoriga liidestamiseks. Mipi CSI, mille on täpsustanud Mipi Alliance'i kaamera töörühm, hõlbustab kaameraanduri ja protsessori vahel kiiret, madalapinge diferentsiaalsignaali (LVD). See tagab tugeva jõudluse minimaalse sekkumisega ja toetab suure eraldusvõimega pildistamist.
MIPI CSI-2, standardi teine versioon, koosneb kolmest kihtist:
Rakenduskiht: haldab kaameramooduli üldist toimingut ja konfiguratsiooni.
Protokolli kiht: käitleb andmete pakendamise, lahtipakkimise ja edastamise protokollid.
Füüsiline kiht: määrab elektrilised omadused, ülekandekeskkonnad, IO vooluringid ja sünkroonimismehhanismid.
Füüsiline kiht määratleb, kuidas andmeid kodeeritakse, teisendatakse elektrilisteks signaalideks ja edastatakse kindlaksmääratud arvu radade või kanalite kohal. Tavaliselt kasutavad MIPI kaamerad edastamiseks neli paari diferentsiaalse andmesignaali ja ühte paari diferentsiaalsignaale. See seadistus toetab kõrgresolutsiooniga pildistamist, tavaliselt 8 miljonit pikslit ja rohkem, ning seda võetakse laialdaselt tavapäraste nutitelefonide kaameramoodulites.
Kiire ja madal häired: MIPI kaamerad võimendavad LVD -sid, mis pakub kiireid andmeedastuskiirusi ja tugevat vastupidavust elektromagnetilisele häiretele.
Paindlikkus ja mastaapsus: tootjad saavad valida mitmesuguste MIPI-ga ühilduvate kaameramoodulite hulgast, et need sobiksid erinevatel kujundusnõuetel ja resolutsioonidel.
Standardimine: MIPI standard tagab kaameramoodulite ja hostiprotsessorite ühilduvuse, lihtsustades integratsiooni ja vähendades disaini keerukust.
MIPI kaameramoodulite rakendused
MIPI kaameramooduleid leidub erinevates rakendustes, sealhulgas, kuid mitte ainult:
Nutitelefonid ja tahvelarvutid: Enamik tänapäevaseid mobiilseadmeid kasutab oma esi- ja tagapildisüsteemide jaoks Mipi kaameraid.
Droonid ja robootika: suure eraldusvõimega MIPI kaamerad võimaldavad mehitamata õhusõidukites ja robotisüsteemides täiustatud nägemis- ja navigeerimisvõimalusi.
Nutikad linnad ja jälgimine: MIPI kaamerad aitavad kaasa linnade jälgimisele, liikluse juhtimisele ja turvalisuse jälgimissüsteemidele.
Autonoomsed sõidukid: Autonoomses juhtimises pakuvad MIPI kaamerad kriitilisi pildiandmeid keskkonna tajumise ja otsuste tegemiseks.
KokkuvõtlikultMipi kaameratähistab mobiilse tööstuse töötleja liidese kaamerat, mis on standardiseeritud lähenemisviis kaameramoodulite liidestamiseks hostitöötlusprotsessoritega mobiilsetes ja täiustatud pildisüsteemides. MIPI CSI ja muid sellega seotud standardeid võimendades pakuvad Mipi kaamerad kiiret, madala sekkumisega andmeedastust, paindlikkust ja mastaapsust, muutes need ideaalseks mitmesuguste rakenduste jaoks nutitelefonidest autonoomsete sõidukiteni.